




- Cài đặt cơ bản các thông số servo delta B3
- Mã sản phẩm: Cài đặt cơ bản các thông số servo delta B3
HK sẽ hướng dẫn khách hàng cài đặt các thông số servo delta B3
- Giá: Liên hệ
- THÔNG TIN SẢN PHẨM
- Đặc tính kỹ thuật
- Ứng dụng
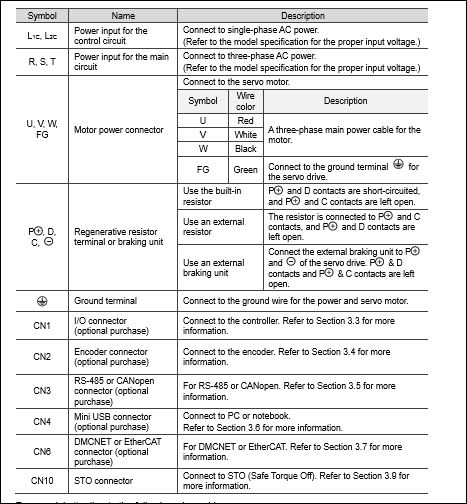
Sơ đồ đấu nối các thiết bị ngoại vi
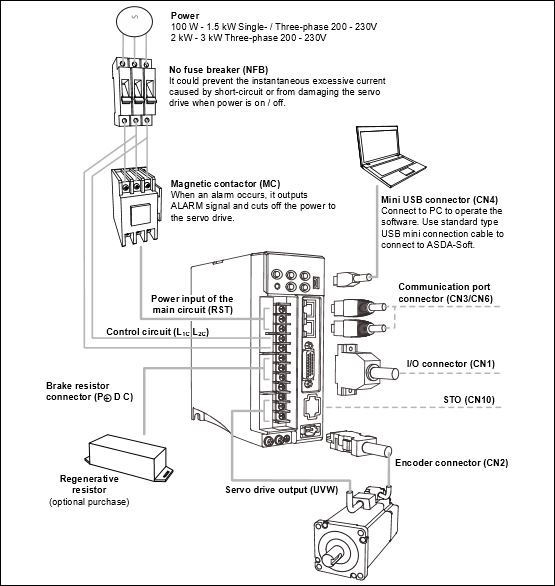
Nguồn vào 1P 220V 2 Dây không phân biệt cực đấu vào L1,L2 (Lưu ý không được đấu 1 dây vào L1 1 dây vào Max sẽ nổ Driver)
Đầu ra U,V,W đấu vào Động cơ có sẵn giắc cắm
Đầu vào Vuông dẹp (CN2) chính là đầu encoder đấu với động cơ qua giắc cắm (Bên B2 là đầu upload/download thông số, rất nhiều người nhầm lẫn chỗ này, B2 Và B3 đầu encoder khác nhau, chỉ giống nhau đầu dây nguồn thôi)
Không cần gắn điện trở xả thêm, Servo đã tích hợp sẵn phía sau lưng rồi
GIẮC IO (CN1) vẫn là 44 CHân y chang B2 dùng để đấu với PLC.
CN10 không có, cái đó chỉ có khi đuôi là -U,-E,F những cổng truyền thông Canopen, Ethernet,....
CN3/CN6 những cổng truyền thông
MIni USB là cáp lấy chương trình cho servo B3, cái này có thể mua ngoài tiệm điện thoại rất thông dụng.
Lưu ý là 100W đến 1.5Kw ( sử dụng 1p220, cao hơn phải dùng 3P220V mới đáp ứng đủ công suất thực và hạn chế báo lỗi mất pha)
GIẢI THÍCH CHI TIẾT CHỨC NĂNG TỪNG PHẦN:
Về Cáp encoder thì gần như các nhà cung cấp đều phải làm sẵn, nên nếu tự hàn thì nhìn theo sơ đồ sau:
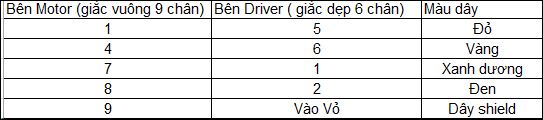
Phần cáp nguồn như sau:
1 là U, 2 Là V, 3 là W, 4 là GDN
Phần cáp điều khiển I/O CN1:
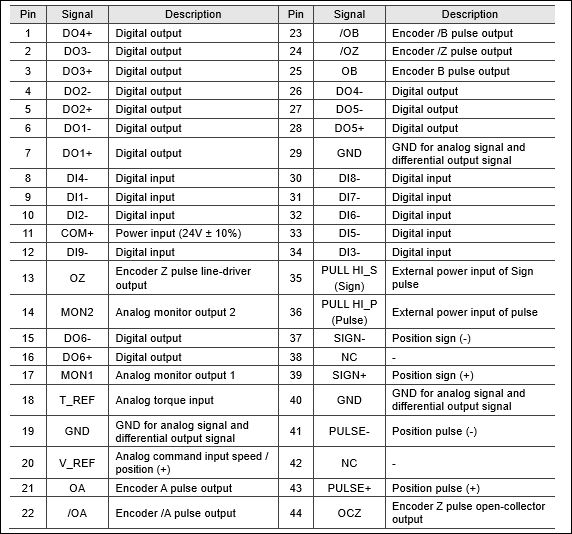
Nhìn rất giống như sơ đồ I/O của dòng B2 chỉ khác nhau, chân Pulse Hi nó chia ra thành 2, pulse hi của xung 35 và chiều 36 phải nối vào + 24Vdc cả 2 chân!
Ví dụ như sài chế độ nhận xung ta hàn cơ bản như sau:
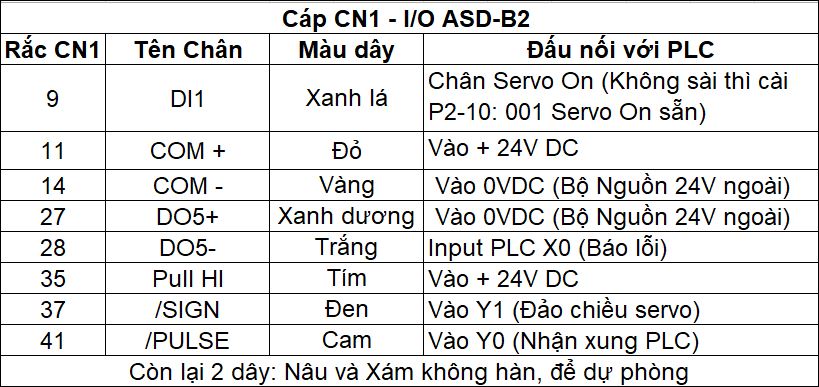
Chân Servo On (Không sài thì cài P2-10: 001 Servo On sẵn)
Chân 11 COM+ Vào + 24V DC
Chân 27 chân cảnh báo alram Vào 0VDC (Bộ Nguồn 24V ngoài)
Chân 28 chân cảnh báo alram 2 Input PLC X0 (Báo lỗi)
Chân 35 Pull hight của Chiều phải cầu với chân 36 PULSE HI của xung ==> Vào + 24V DC,
Chân 37 Sign chân chiều Vào Y1 đảo chiều của PLC
Chân 41 /puslse Chân xung vào Y0 của PLC
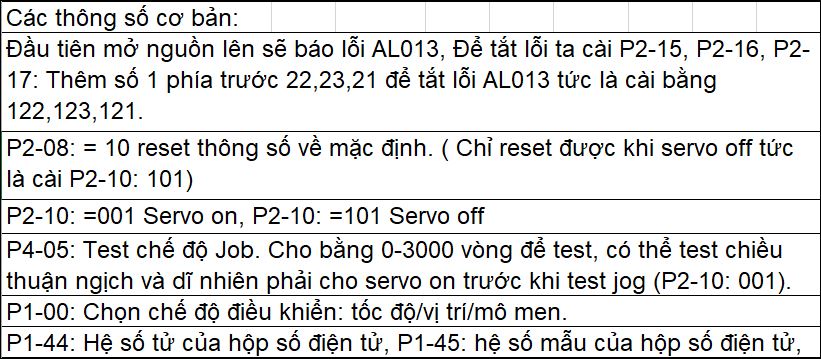
CÁC THÔNG SỐ CÁI ĐẶT CƠ BẢN:
Sau khi đấu nối xong, ta tiến hành lập trình PLC Delta
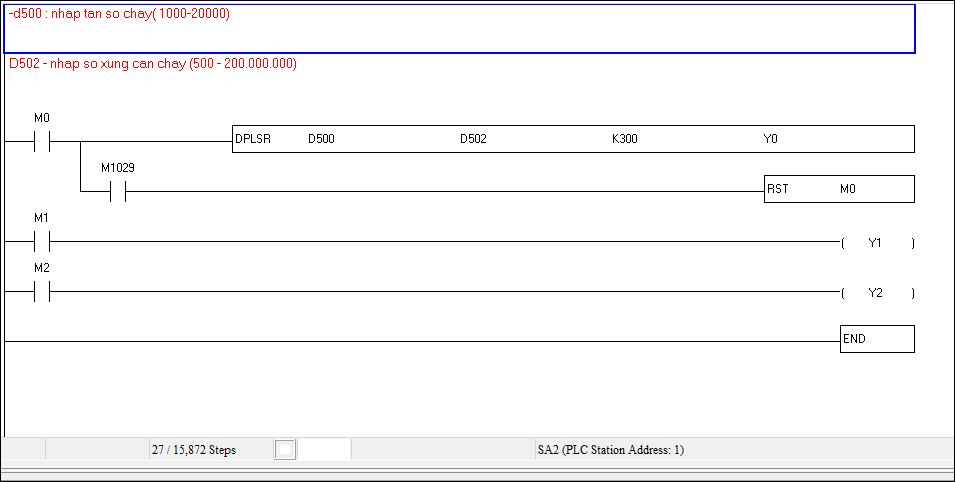
D500 : nhap tan so chay( 1000-20000)
D502: nhap so xung can chay (500 - 200.000.000)
Viết tiếp chương trình HMI Delta:
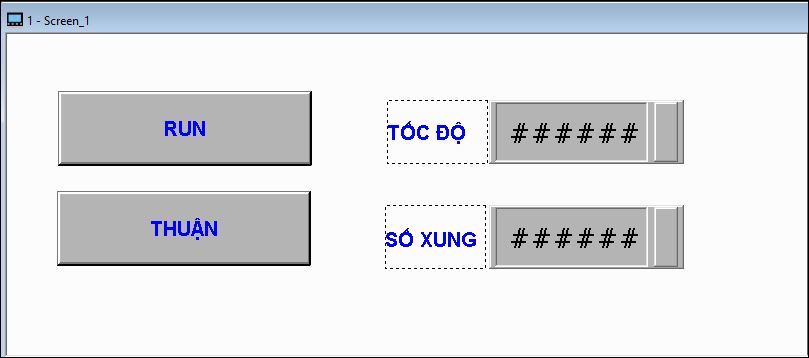
Tạo 2 nút nhấn STop và Run, Thuận và Nghịch để gắn cho M0 và M1
2 Nút nhận Nuberic entry để gắn cho D500 và 502
Như vậy ta thay đổi D500 và D502 sẽ cho ra số xung trên vòng quay: Chạy bao lâu và tần số của xung khác nhau: quay nhanh hay chậm.
Từ đó sẽ thấy rõ kết quả.
- BIẾN TẦN
- BỘ LẬP TRÌNH PLC
- PLC DELTA ĐÀI LOAN
- PLC DELTA DVP-SS2
- PLC DELTA DVP-SX2
- PLC DELTA DVP-SV2
- PLC DELTA DVP-SA2
- PLC DELTA DVP-SE
- PLC DELTA DVP-ES2
- PLC DELTA DVP-EC3
- MÔ ĐUN PLC DELTA
- HỖ TRỢ LẬP TRÌNH PLC DELTA
- PLC DELTA DVP-ES3
- PLC DELTA DVP-EH3
- PLC DELTA DVP-EX2
- PLC DELTA DVP-20PM
- PLC DELTA DVP-12SC
- PLC DELTA DVP-MC
- COMMUNICATION CONVERTER
- PLC MITSHUBISHI
- PLC XINJE
- PLC SIEMENS
- PLC OMRON
- PLC INVT
- PLC DELTA ĐÀI LOAN
- MÀN HÌNH HMI
- AC SERVO
- THIẾT BỊ HỖ TRỢ
- BỘ ĐIỀU KHIỂN NHIỆT ĐỘ
- ĐỘNG CƠ BƯỚC - STEP
- LÀM TỦ ĐIỆN PLC
- GIẢI PHÁP KỸ THUẬT

HMI DELTA DOP-110WS 10.1inch Ethernet
Giá: 8.000.000 vnđ

Driver động cơ bước DM860H
Giá: 1.500.000 vnđ

Biến tần Ihtek S100-2S0007N-A
Giá: 1.699.000 vnđ

BIẾN TẦN SLANVERT 0.75KW 220V HOPE65G0.75S2B
Giá: 1.650.000 vnđ

ĐỒNG HỒ NHIỆT ĐỘ DELTA DTK4848R12
Giá: 1.020.000 vnđ

HMI Delta kết nối PLC Delta DOP-DVP
Giá: 200.000 vnđ

Module Analog input 4AI 14Bit Delta DVP04AD-S2
Giá: 2.700.000 vnđ

Biến tần Shihlin SL3-021-0.4K 1 Pha 220V Công suất 0.4Kw
Giá: 1.580.000 vnđ

HMI Mitsubishi GS2107-WTBD-N
Giá: 4.090.000 vnđ

Bộ nguồn 24V 50W PMT-24V50W2BA
Giá: 220.000 vnđ

CÁP LẬP TRÌNH PLC MITSUBISHI USB-SC09-FX
Giá: 300.000 vnđ

HMI PROFACE PFXGP4402WADW-GP4402WW
Giá: 6.500.000 vnđ

Module Delta DVP16SP11T (8 ngõ vào + 8 ngõ ra Transistor)
Giá: 1.200.000 vnđ

Module Delta DVP16SP11R (8 ngõ vào + 8 ngõ ra Relay)
Giá: 1.200.000 vnđ

PLC Delta DVP16ES200T (8 in / 8 out Transistor)
Giá: 2.300.000 vnđ

HMI Delta DOP-103BQ 4.3 inch cơ bản
Giá: 2.100.000 vnđ

PLC Delta DVP12SA211T (8 in / 4 out Transistor)
Giá: 2.300.000 vnđ

PLC Delta DVP14SS211R (8 in / 6 out Relay) PLC Gía Rẻ
Giá: 1.450.000 vnđ

Động cơ bước 86HS085
Giá: 1.200.000 vnđ

HMI Delta kết nối PLC Mitsubishi DOP-FX
Giá: 200.000 vnđ

Biến tần Shihlin SL3-021-0.75K 1 Pha 220V Công suất 0.75Kw
Giá: 1.680.000 vnđ

Biến tần Delta VFD007M21A
Giá: 1.850.000 vnđ

Biến tần Shihlin 0.75Kw 1P 220V SS2-021-0.75K
Giá: 2.480.000 vnđ

HMI Delta DOP-107BV 7 inch cơ bản
Giá: 2.100.000 vnđ

PLC Delta DVP14SS211T (8 in / 6 out Transistor) PLC Gía Rẻ
Giá: 1.450.000 vnđ

BIẾN TẦN DELTA 0.75KW 220V VFD007EL21W-1 GIÁ TỐT NHẤT CO,CQ ĐẦY ĐỦ
Giá: 2.000.000 vnđ

Biến tần Shihlin SC3-021-0.75K 1 Pha 220V Công suất 0.75Kw
Giá: 1.950.000 vnđ

PLC Delta DVP28SA211T (16 in / 12 out Transistor)
Giá: 3.050.000 vnđ

HMI Delta DOP-110CS 10 inch cơ bản
Giá: 4.950.000 vnđ

Bộ lập trình PLC Delta DVP20SX211T 4AI/2A0 Xử Lý Analog
Giá: 4.100.000 vnđ

HMI MITSUBISHI GS2110-WTBD-N
Giá: 8.400.000 vnđ

Màn hình Delta TP04G-AS2 3inch
Giá: Liên hệ

BỘ ĐIỀU KHIỂN SERVO ASD-B3-0421-L 400W
Giá: 3.900.000 vnđ

Mô đun FX2N-16EX
Giá: 910.000 vnđ

PLC Delta DVP28SS211T (16 in / 12 out Transitor) Loại giá rẻ
Giá: 2.400.000 vnđ

CÁP LẬP TRÌNH PLC DELTA
Giá: 300.000 vnđ

BỘ SERVO DELTA B2 400W GIÁ RẺ
Giá: 7.000.000 vnđ

PLC Mitsubishi FX1S-20MR-001 (12 In / 8 Out Relay)
Giá: 1.900.000 vnđ

BỘ SERVO DELTA B2 750W GIÁ RẺ
Giá: 8.000.000 vnđ

ĐỘNG CƠ SERVO DELTA ECMA-C20604RS 400W
Giá: 4.000.000 vnđ

Biến tần Janson Control FC110-4T-0.75G
Giá: 100 vnđ

HMI DELTA DOP-107CV 7inch 2 cổng COM Độc lập
Giá: 3.900.000 vnđ

BỘ SERVO DELTA B2 1KW GIÁ RẺ
Giá: 12.000.000 vnđ

HMI DELTA DOP-107DV 7inch Ethernet Delta
Giá: 3.500.000 vnđ

BỘ SERVO DELTA B2 1.5KW GIÁ RẺ
Giá: 15.000.000 vnđ

ECMA-C20807RS
Giá: 5.000.000 vnđ

BỘ SERVO DELTA B2 2KW GIÁ RẺ
Giá: 18.000.000 vnđ

HMI DELTA DOP-107WV 7inch Ethernet 2 Cổng COM độc lập
Giá: 5.900.000 vnđ

BỘ SERVO DELTA B2 3KW GIÁ RẺ
Giá: 28.000.000 vnđ

ĐỘNG CƠ SERVO DELTA ECMA-E21310RS 1KW
Giá: 8.622.000 vnđ

Cáp Servo Delta ASDA-B2/AB
Giá: 350.000 vnđ

ĐỘNG CƠ SERVO DELTA ECMA-E21315RS 1.5KW
Giá: 11.039.000 vnđ

HMI DELTA DOP-110IS 10.1inch Ethernet Cao cấp
Giá: 8.500.000 vnđ

ĐỘNG CƠ ECM-B3M-C20604SS1 400W CÓ THẮNG
Giá: 5.490.000 vnđ

 Trâm Anh
Trâm Anh- 0947 767 687
- oanhkieu211188@gmail.com
-
Trần Hiến
- 0902 590 312
- trandinhhien128@gmail.com








